Fahrterkennung
Der Auslösedetektor ist in den Einheiteneigenschaften konfiguriert und wird verwendet, um Bewegungsintervalle (Auslöse) und Leerlauf (Stopps, Parkplätze) zu erkennen. Abhängig von der Ausrüstung und den Einstellungen auf dieser Registerkarte können die Berichte je nach Bewegungs- und Leerlaufintervallen ganz anders aussehen. Daher ist es wichtig, hier die richtigen Einstellungen festzulegen.
Die erforderlichen Zugriffsrechte: Detaillierte Eigenschaften anzeigen, um diese Registerkarte anzuzeigen; Fahrtendetektor und Kraftstoffverbrauch bearbeiten, um diese Registerkarte zu bearbeiten.
Bewegungserkennung
Es gibt fünf Hauptmethoden, um Bewegungen zu erkennen.
| Art | Beschreibung |
|---|---|
| GPS-Geschwindigkeit | Kann auf jeden Gerätetyp und jede Konfiguration angewendet werden. Die Parameter dieser Methode werden im Folgenden beschrieben. |
| GPS-Koordinaten | Kann nur für Geräte verwendet werden, die Standortdaten senden, da die Geschwindigkeit bei der Berechnung der Bewegung nicht berücksichtigt wird. Die Bewegung wird erkannt, wenn die Koordinaten in zwei aufeinanderfolgenden Nachrichten unterschiedlich sind. Diese Methode der Bewegungserkennung wird immer bei der GPS-Korrektur verwendet (siehe unten). |
| Motorzündungssensor | Verfügbar für Einheiten mit einem Sensor des gleichen Namenstyps. Die Bewegung wird unter zwei Bedingungen erkannt: Der Sensor sollte eingeschaltet werden und die Nachricht wird mit einer Geschwindigkeit empfangen, die größer oder gleich der Mindestgeschwindigkeit ist. Das Ende der Bewegung wird erkannt, wenn der Sensor ausgeschaltet wird oder ein Geschwindigkeitswert kleiner als die angegebene minimale Bewegungsgeschwindigkeit ist. Außerdem gilt die Bewegung als beendet, wenn das Timeout überschritten wird. |
| Kilometerstandsensor | Kann für Einheiten verwendet werden, die einen Sensor des gleichen Namenstyps haben. Der Sensor überträgt absolute Laufleistung. Die Bewegung wird erfasst, wenn die Werte des Abstandssensors steigen und die Nachricht mit einer Geschwindigkeit empfangen wird, die größer oder gleich der Mindestgeschwindigkeit ist. Wenn der Geschwindigkeitsparameter fehlt oder ungültig ist, wird der Bewegungszustand außerdem nur durch das Wachstum der Werte des Laufleistungssensors bestimmt. |
| Relativer Kilometerzähler | Verfügbar für Einheiten mit einem Sensor des gleichen Namenstyps. Es zeigt, welche Entfernung das Gerät seit der vorherigen Nachricht zurückgelegt hat. Die Bewegung wird beim Empfang einer Nachricht mit mehr als 0 Wert eines relativen Kilometerzählers und einem Geschwindigkeitswert erfasst, der höher als die minimale Bewegungsgeschwindigkeit ist. Darüber hinaus kann der Bewegungszustand nur mit relativen Kilometerzählerwerten erkannt werden, wenn der Geschwindigkeitsparameter verpasst oder ungültig ist. |
Erkennung von Bewegungszuständen
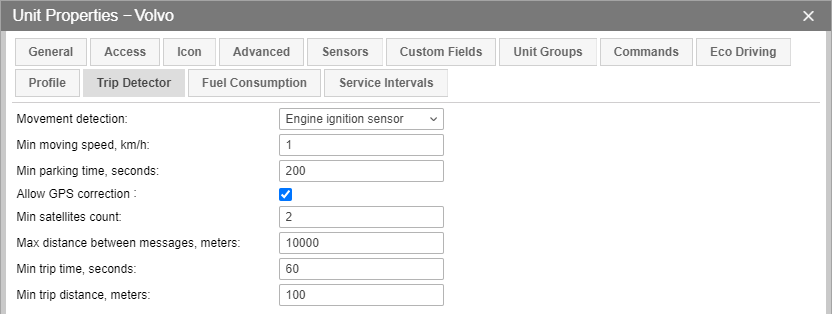
Min. Bewegungsgeschwindigkeit
Geben Sie an, welche Geschwindigkeit als Beginn der Bewegung betrachtet werden soll. Dies ist erforderlich, um Datenausreißer auszuschließen. Die Ausrüstung kann Koordinaten mit einer gewissen Ungenauigkeit bestimmen, so dass sie der Einheit, die sich nicht tatsächlich bewegt, eine niedrige Geschwindigkeit zuweist. Legen Sie diesen Parameter fest, um solche Fälle von den Stolperten auszuschließen. Bei der Bestimmung der Bewegung durch einen Sensor (z.B. Zündung) wird dieser Parameter verwendet, um Haltestellen innerhalb einer Fahrt zu erkennen.
Mindestparkzeit
Geben Sie an, wie lange (in Sekunden) das Gerät bewegungslos sein soll, um dies als Parkplatz zu registrieren. Mit dieser Option können Sie Haltestellen (in Staus, an Ampeln oder Kreuzungen) in eine Fahrt einbeziehen (anstatt die Fahrt zu unterbrechen). Wenn das Zeitintervall zwischen den beiden nächstgelegenen Nachrichten jedoch länger als die Mindestparkzeit ist, wird die Fahrt in zwei Teile unterteilt. Bei der Erkennung von Fahrten durch den Sensor (z.B. Zündung) wird dieser Parameter nur auf Intervalle angewendet, in denen der Sensor ausgeschaltet ist oder mit einer Geschwindigkeit kleiner als einer minimalen Bewegungsgeschwindigkeit ist. Wenn GPS-Korrektur zulassen aktiviert ist, sollte der Wert der Mindestparkzeit nicht weniger als 10 Sekunden betragen. Beachten Sie, dass es zur Erkennung einer Parkdauer notwendig ist, mindestens zwei Nachrichten mit einem Geschwindigkeitswert unterhalb der angegebenen minimalen Fahrgeschwindigkeit zu erhalten.
GPS-Korrektur zulassen
Diese Option wird automatisch für die ersten beiden Arten der Bewegungserkennung angewendet. Wenn Sie einen der Sensoren (Zündung, Laufleistung oder Kilometerzähler) verwenden, um genauere Daten in Berichten zu erhalten, können Sie zusätzlich die GPS-Korrektur verwenden. Um die GPS-Korrektur der Reise-/Aufenthaltserkennung zu aktivieren, aktivieren Sie das Kontrollkästchen GPS-Korrektur zulassen und konfigurieren Sie die unten beschriebenen Parameter.
Anzahl der Min. Satelliten
Geben Sie die Anzahl der verfügbaren Satelliten an, um eine Reise zu erkennen. Die empfohlene Zahl ist drei und mehr, aber für einige Arten von Geräten reicht zwei aus.
Max. Abstand zwischen Nachrichten
Diese Einstellung wird in der folgenden Situation angewendet: Wenn eine Einheit von der vorherigen Nachricht auf die aktuelle eine Entfernung verschoben hat, die größer ist als die angegebene, wird das vorherige Intervall beendet und eine neue beginnt. Der Wert dieses Feldes sollte mindestens 50 Meter betragen.
Min. Reisezeit
Dieser Parameter soll Fälle der Datenausreißer ausschließen. Zum Beispiel bewegte sich das Gerät auf einem Parkplatz von einem Ort zum anderen, und die Bewegung von 40 Sekunden wurde erkannt. Um solche Fälle von Reisen auszuschließen, legen Sie die minimale Reisezeit (in Sekunden) fest.
Min. Reiseentfernung
Dies ist ein ähnlicher Parameter. Aber hier geben Sie die minimale Reiseentfernung an. Zum Beispiel wird das Auto geparkt, und das Gerät sendet Koordinaten, nach denen sich das Auto leicht bewegt hat. Es kann aufgrund des zulässigen Gerätefehlers passieren. Diese Situation kann für die Bewegung gezählt werden und um sie auszuschließen, geben Sie an, wie weit sich die Einheit bewegen soll, um sie als Reise zu betrachten.